CanSat 2013/4
CanSat 2013/4 is an international competition run by the education office ESERO of ESA. where teams design a can-sized model satellite that must survive 1000m from a rocket. All teams must transmit air pressure and temperature data via a radio link on decent to a ground station and preform a secondary mission of their choice.
Our chosen secondary mission was to deploy a rover from a landing vehicle that could be controlled from the ground station via long-range wifi. The rover would stream video and data back to the ground station. Using a Gumstix CPU running linux and a custom-built Arduino PCB, we partially completed the mission.
Due to an ongoing fault with the 3D printer we were using to build the chassis, we were left with one evening to integrate the entire project and make it competition worthy before we traveled for the competition. That was a very long night in the workshop. Subsequently, on the trip itself, I was up until 1am for three nights doing the outreach videos – a key component in the competition – for the day that had just elapsed. These are linked below
We were awarded runners-up and I like to think that our project was one of the more complex there: 5 custom PCBs, a GUI for the base station, a micro linux computer interfacing with an Arduino in the rover, long-range wifi with a high-gain parabolic antenna, an antenna positioning system with an LCD display and a project presentation prepared in under one hour after the initial launch on the first day was aborted. The problem was that our satellite was just that bit over-spec in diameter. 69mm instead of 66mm, which resulted in the satellite not quite fitting into the ESA launch vehicle and thus costing us the 1st place.
You can find the update videos on our youtube channel: https://www.youtube.com/user/cansatnova

The rover after decent inside the landing module

The rover with its velcro tracks. We attached rubber band segments to the velcro to keep the track in tension

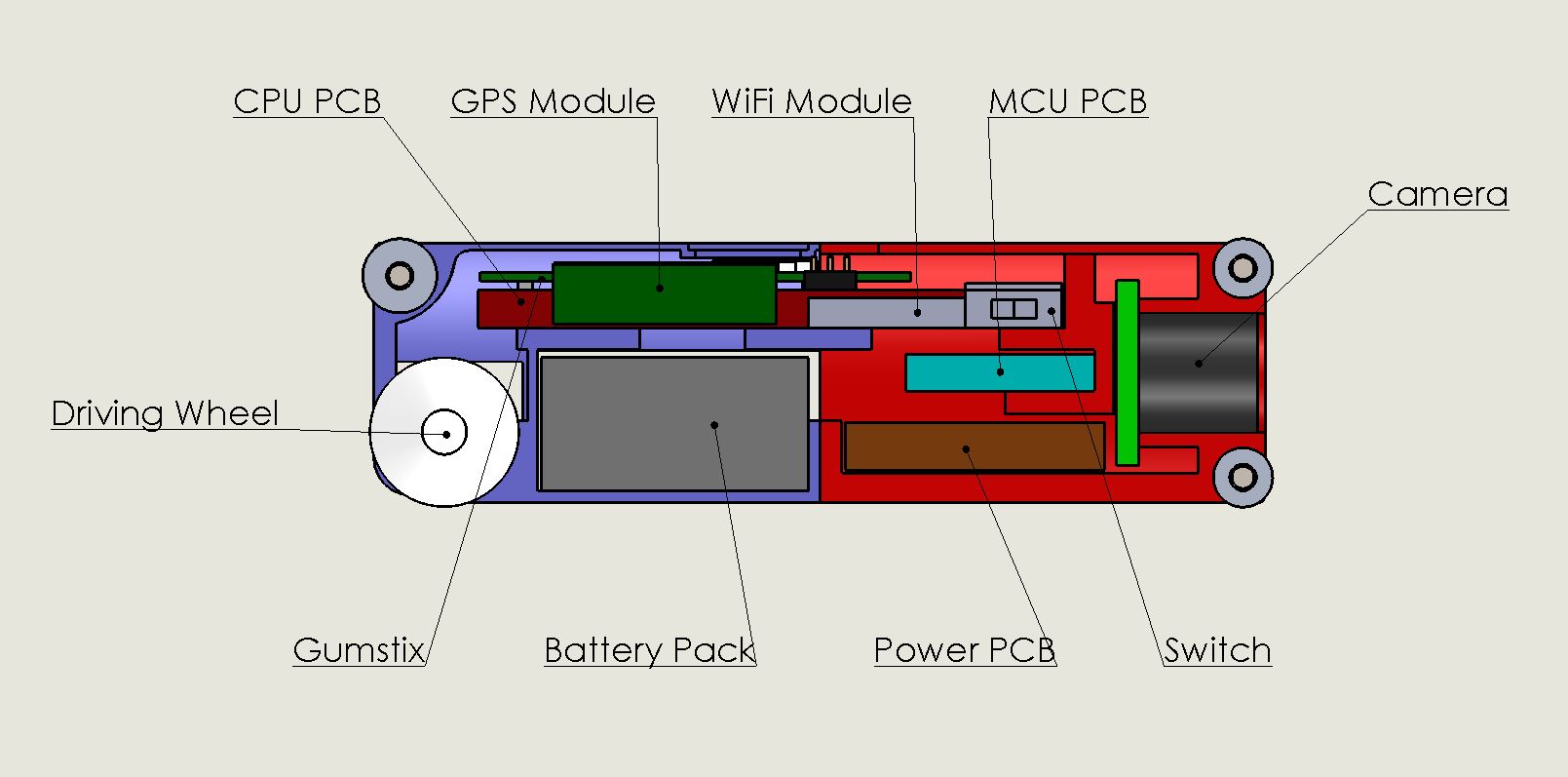
The inside of the rover. On the right you can see the Gumstix CPU custom PCB